
tutoriel complet build du moineau HD
Ce guide explique pas-à-pas comment assembler « Le Moineau », un drone particulièrement adapté pour débuter en FPV.
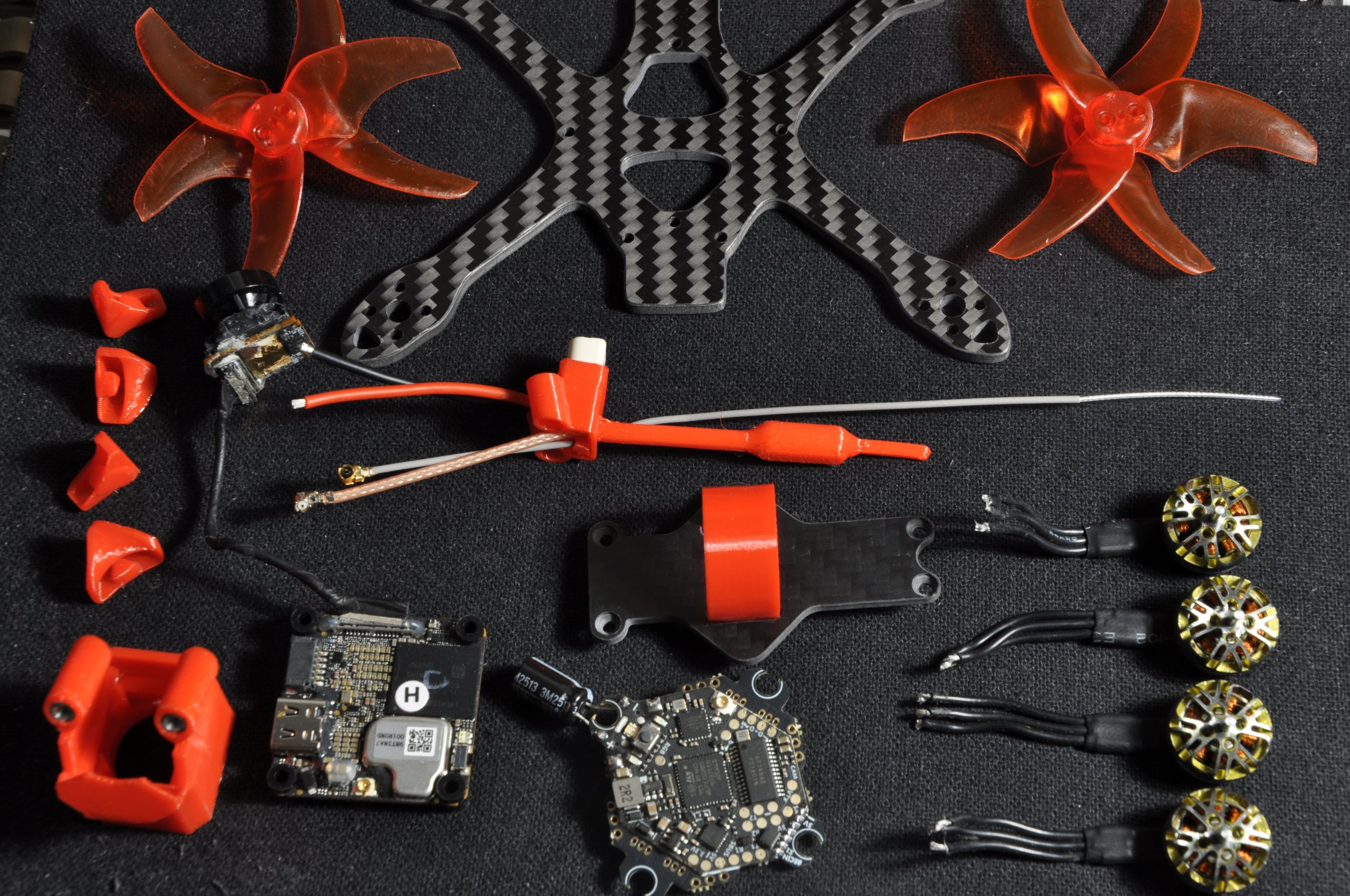
🛒 Matériel nécessaire :
- Une frame : Le Moineau
- Les impressions 3D en TPU (fournies avec le châssis)
- 4 moteurs (ex : Sparkhobby 8500kv)
- Des hélices 2.5″ (ex : AVAN Rush)
- Un VTX DJI O4 (voir le guide de préparation)
- Une carte AIO, impérativement avec RX intégré (ex : JHEMCU G435 ELRS ou Darwin FPV)
🛠️ Outils :
- Un tournevis hexagonal 1.5mm
- De la Patafix (pour maintenir la carte durant les soudures)
- De la gaine thermorétractable
- Un fer à souder (ex : Alientek T80)
- De l’étain (au plomb si possible, pour faciliter les soudures)
- Une pince coupante et une pince de précision
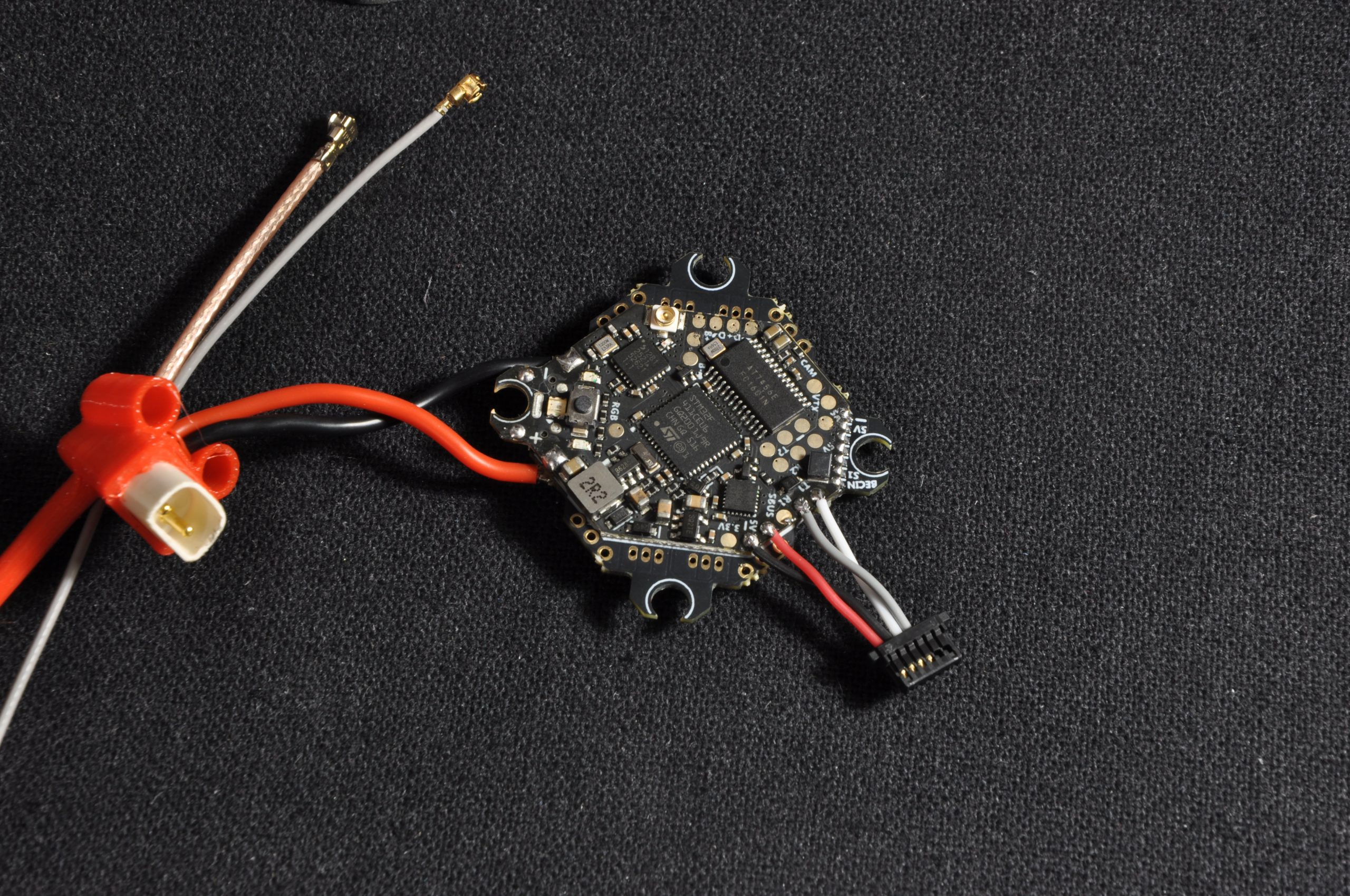
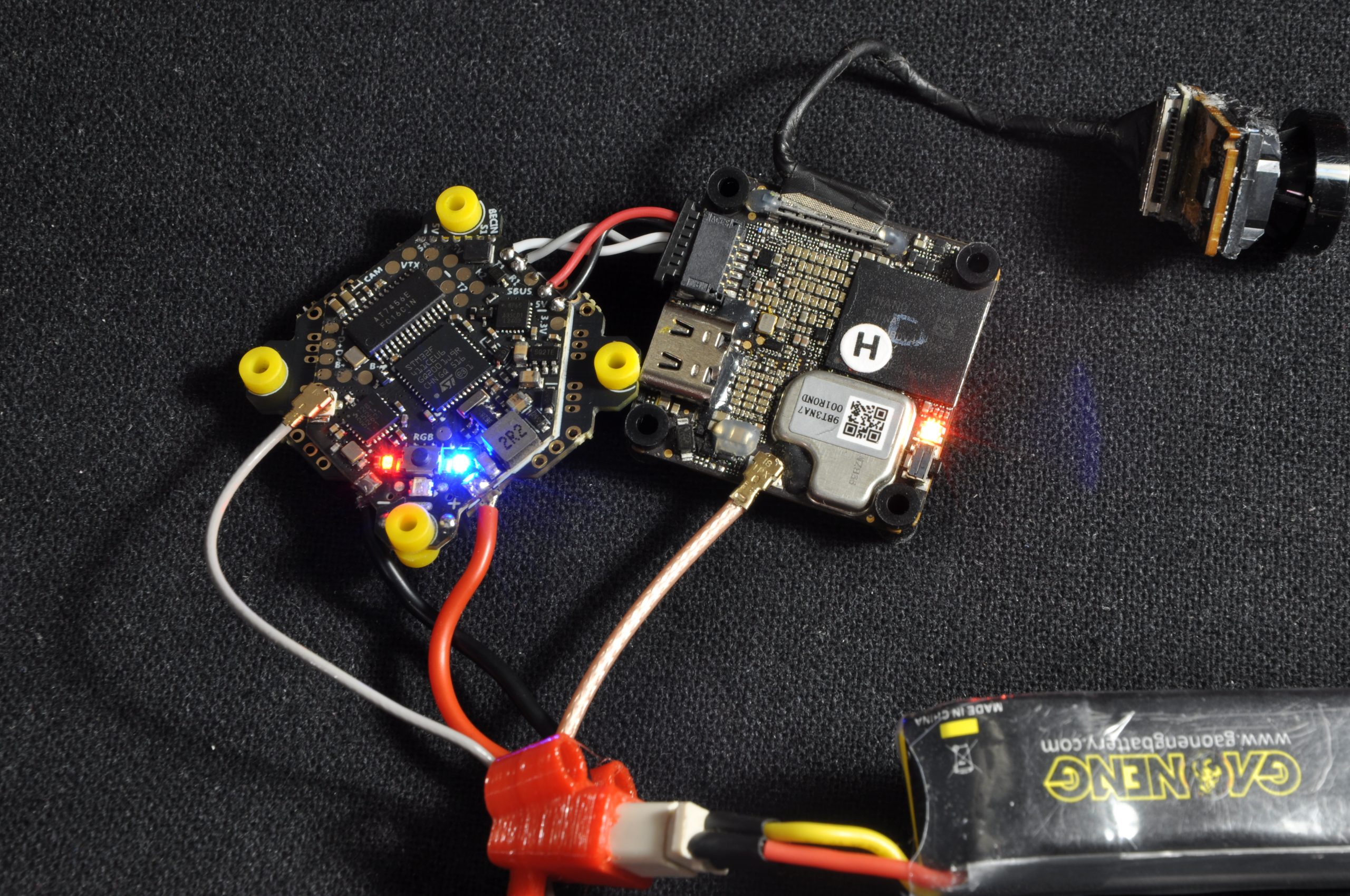
Étape 1 : Préparation et soudures de l’AIO
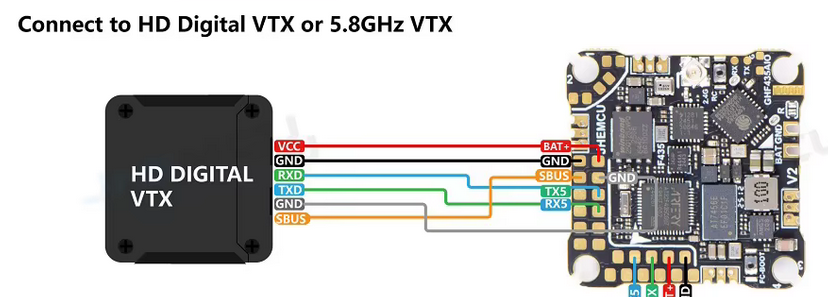
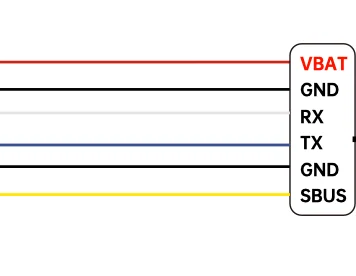
Commencer par couper et souder le connecteur du DJI O4 directement sur la carte AIO. Pour s’assurer du bon brochage, se référer au schéma du constructeur de la carte ainsi qu’au code couleur des câbles DJI.
ℹ️ Note : Le fil jaune du connecteur DJI sert uniquement si une radiocommande DJI est utilisée (ce qui est déconseillé en règle générale). Il peut donc être retiré.
Souder ensuite le connecteur de la batterie (pigtail, ici un BT3 inclus dans le kit du Moineau). Voici les recommandations pour réussir cette soudure imposante :
- Régler le fer à souder à sa température maximale.
- Étamer généreusement le pad sur la carte et le fil.
- Chauffer et assembler les deux éléments rapidement. Un temps de chauffe trop long risque de dessouder les composants CMS adjacents.
Étape 2 : Vérification de la carte
Avant d’aller plus loin, brancher la carte via USB ou batterie pour vérifier que tout fonctionne (allumage des LEDs). Les cartes AIO de ce format peuvent parfois présenter des défauts d’usine.
⚠️ Avertissement : À titre d’exemple, la carte JHEMCU initialement prévue pour ce montage s’est avérée défectueuse et a dû être remplacée par un modèle Darwin FPV après remboursement.
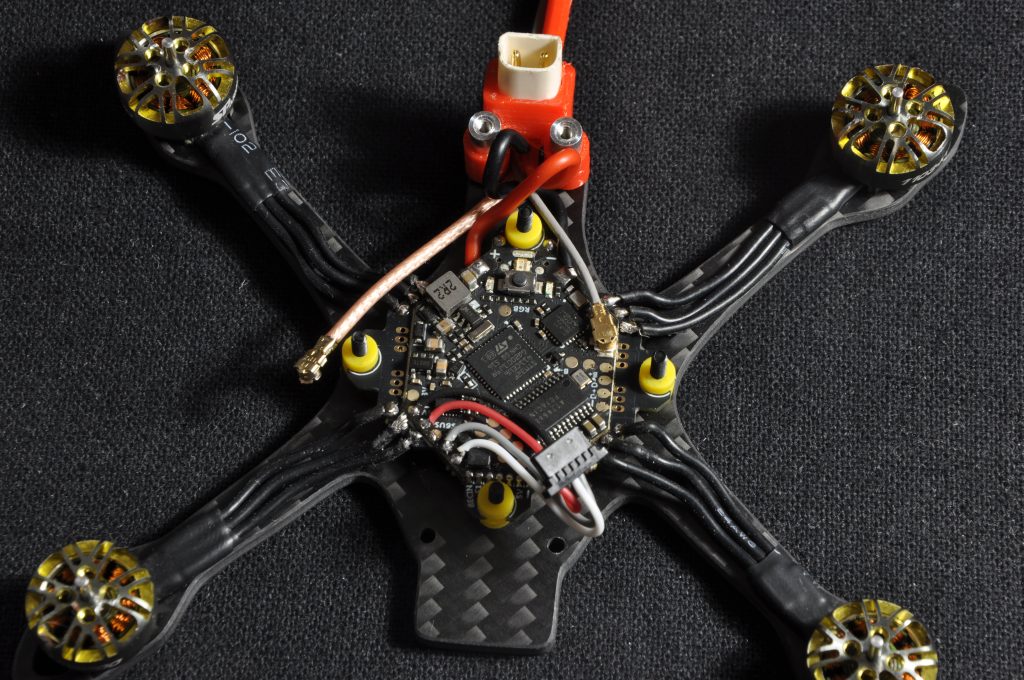
Étape 3 : Installation de l’AIO et des moteurs
Fixer la carte AIO sur le châssis en utilisant les vis et les écrous en nylon. Visser ensuite les moteurs sur les bras avec les vis M2 de 5mm (les plus courtes).
Couper les câbles des moteurs à la longueur adéquate, les dénuder, les étamer, puis les souder aux pads de l’AIO. Les ESC modernes disposent de protections contre les courts-circuits : en cas de mauvaise soudure, le moteur refusera simplement de démarrer, laissant l’opportunité de corriger le montage sans dégât.
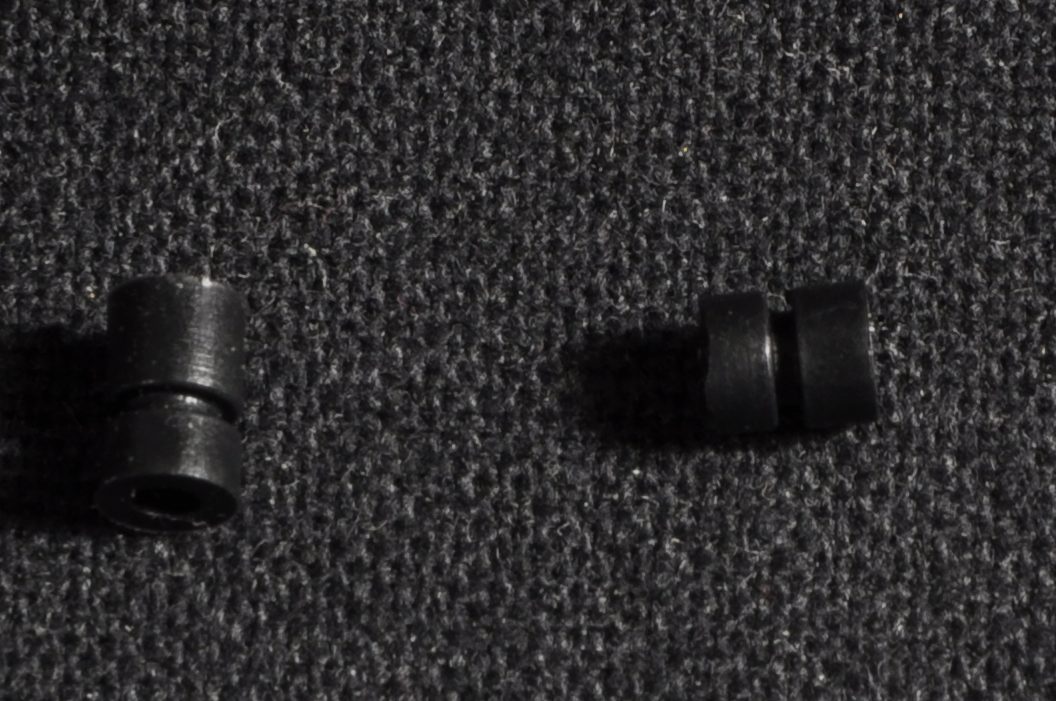
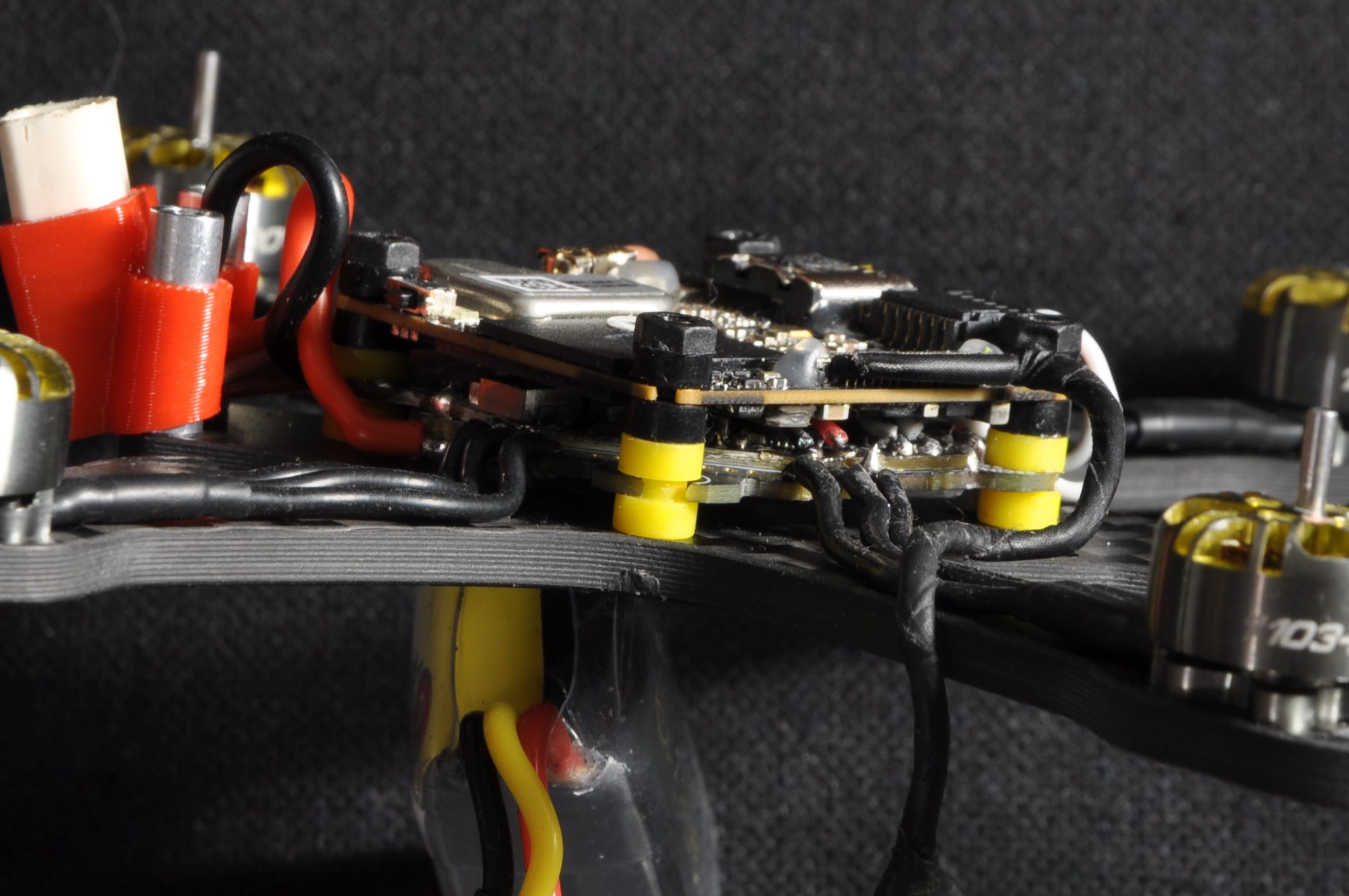
Étape 4 : Installation du DJI O4
Avant d’installer le VTX, raccourcir légèrement ses amortisseurs en caoutchouc (« gummies ») en les coupant, afin qu’ils s’insèrent correctement entre les entretoises du châssis.
Placer le DJI O4 sur la stack. Il est impératif de faire passer son câble d’alimentation entre ses deux circuits imprimés (PCB). Vérifier qu’aucun composant ne se touche ou ne se frôle, puis sécuriser le tout avec quatre écrous en nylon.
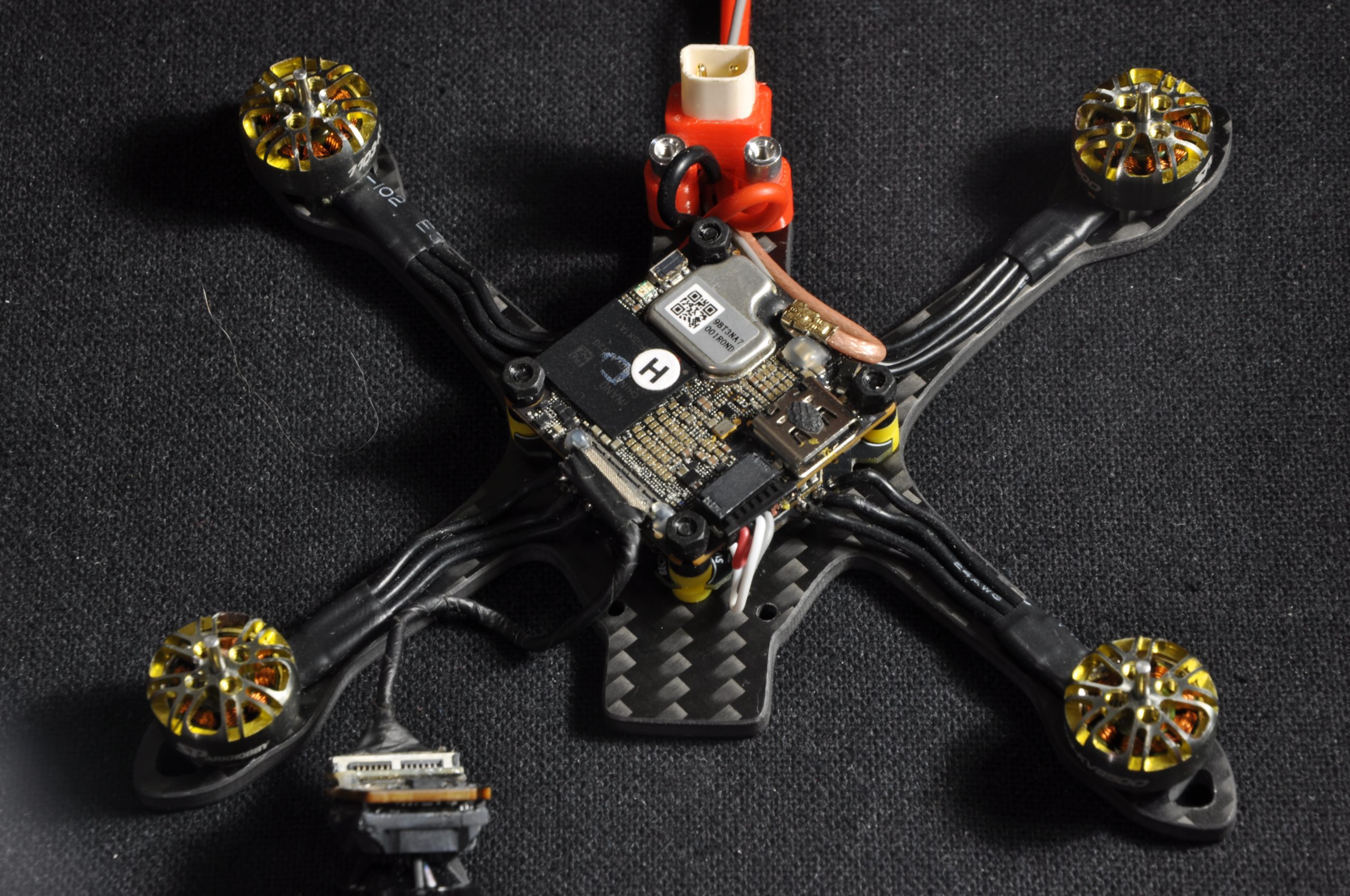
Étape 5 : Montage de la caméra et des impressions 3D
Insérer la caméra dans son support en TPU, puis la brancher au VTX (en veillant toujours à ce que le câble passe sous l’O4).

Astuces de montage :
- Enfoncer les entretoises en aluminium dans les pièces en TPU avant de les visser au châssis.
- Pour rigidifier l’antenne du VTX, il est possible d’y ajouter un morceau de gaine thermorétractable. La couper en biseau facilitera son insertion dans le TPU (étape inutile si l’option « backpack avec antenne intégrée » a été choisie).
- Visser les 4 entretoises sans forcer excessivement, l’aluminium restant un matériau fragile.
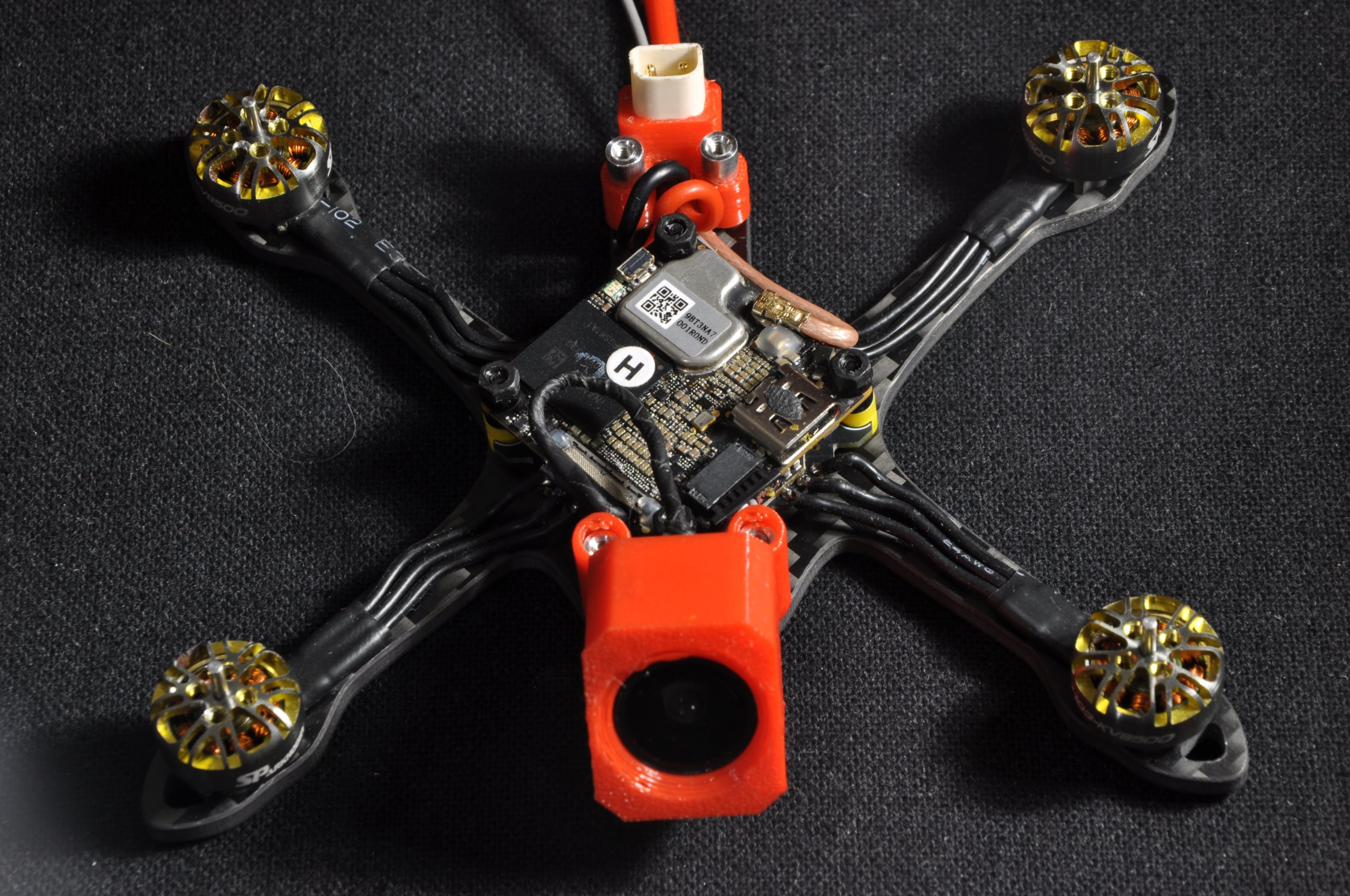
Étape 6 : Assemblage final
Installer la plaque supérieure (top plate) et procéder au montage des hélices.
ℹ️ Note : Il est fortement recommandé de visser les hélices. Bien que cela ajoute un léger poids, cette méthode élimine une grande partie des vibrations en vol.


Étape 7 : Configuration Betaflight & Bluejay
Le montage matériel est terminé. Il reste à configurer la partie logicielle. Voici la marche à suivre :
- Mettre à jour le firmware des ESC (Bluejay) et de la carte de vol (Betaflight).
- Réglages Bluejay : Augmenter le Maximum Startup Power (nécessaire car les moteurs 8500kv en 2S demandent beaucoup de courant au démarrage) et régler la fréquence PWM sur 24kHz pour maximiser le couple.
- Vérifier l’ordre et le sens de rotation des moteurs sous Betaflight.
- Configurer l’UART correspondant au DJI O4 ainsi que l’OSD.
- Assigner les interrupteurs de la radiocommande (Armement, Turtle mode / Crashflip, etc.) dans l’onglet « Modes ».
- Ajuster les PIDs selon le comportement en vol souhaité.
- Optimisation : Il est recommandé de désactiver le RC smoothing et d’activer le DSHOT bidirectionnel pour de meilleures performances.

