AM32, Guide de configuration avancée
Le firmware AM32 est apprécié pour la grande liberté de réglage qu’il offre. Cependant, il souffre parfois d’une mauvaise réputation, souvent due à une configuration inadaptée, le configurateur n’étant pas toujours parfait.
AM32 est le firmware open source de référence pour les contrôleurs de moteur brushless (ESC) en 32 bits, utilisé sur les robots, les drones et les voitures RC.

AM32 s’avère plus complexe à configurer sur les petits drones.
Pour les drones classiques 5 pouces en 6S, la configuration est simple : il suffit généralement de conserver les paramètres par défaut.
Ce guide s’adresse donc aux configurations plus inhabituelles, nécessitant d’exploiter les réglages spécifiques proposés par AM32.
1. Le configurateur
AM32 se configure via l’outil en ligne am32.ca (incompatible avec Firefox). Pour la connexion, il faut brancher le drone en USB avec la batterie branchée, puis cliquer sur « Read ».
1.1 Flasher les ESC
Il est vivement recommandé de flasher les ESC, AM32 ayant beaucoup évolué ces dernières années.
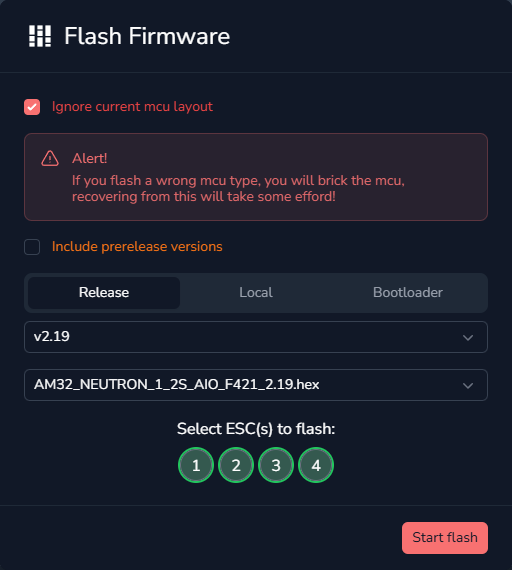
Au moment de la rédaction de ce guide, la dernière version est la 2.19.
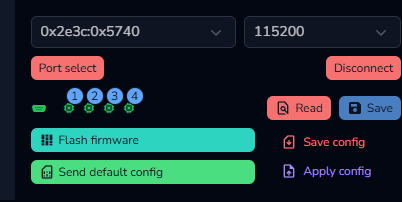
Cliquer sur « Flash Firmware », puis sélectionner les 4 ESC, la dernière version et la cible.
Il est parfois nécessaire de cocher « ignore current MCU layout », les constructeurs installant souvent d’usine une ancienne version du firmware.
2. Les réglages moteur
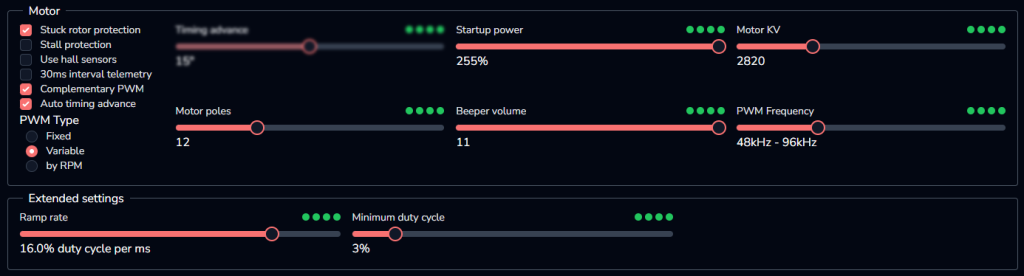
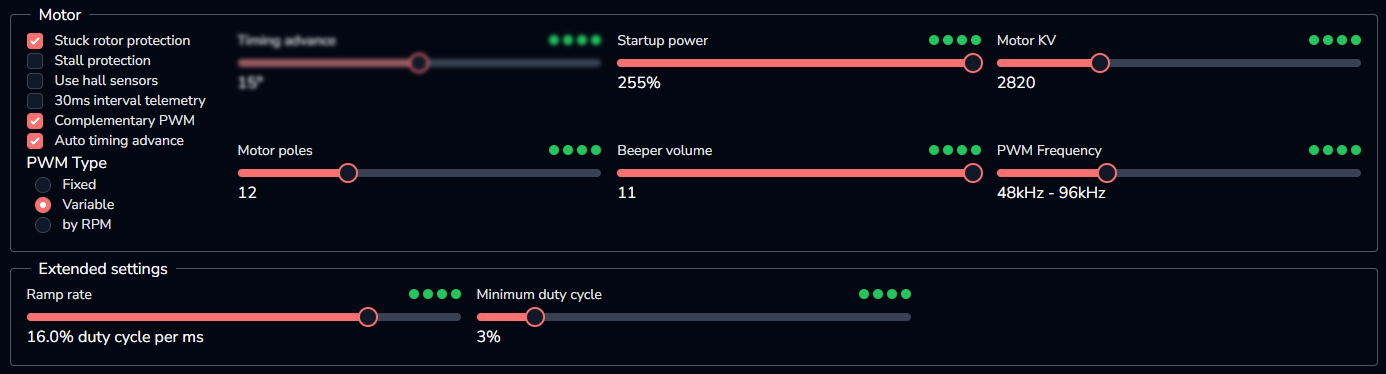
2.1 Les sliders
Ce chapitre détaille l’influence des sliders et leur bonne utilisation.
– Timing advance : Alimenter les bobines en avance pour une aimantation au moment optimal.
Un moteur brushless fonctionne avec des bobines qui s’allument successivement pour générer une rotation. Le « timing advance » définit le décalage, en degrés, entre l’allumage des bobines et la formation du champ magnétique. L’option « auto timing advance » est généralement privilégiée, ou un réglage fixe entre 15 et 22 degrés.
– Startup power : La puissance nécessaire pour démarrer les moteurs.
Le démarrage est la phase la plus critique pour un moteur brushless. Impossible de connaître la position d’un moteur immobile, il faut donc forcer le mouvement « à l’aveugle ». Ce slider définit la puissance allouée à cette action. En règle générale, plus le KV est faible et les ESC puissants, plus cette valeur doit être élevée. (Exemple : pour un moteur 8500KV en 2S sur un AIO 20A, cette valeur peut être mise au maximum). Le slider « minimum duty cycle » joue également un rôle important ici.
– Minimum duty cycle : La puissance minimum à bas régime.
Forcer une meilleure alimentation à bas régime aide à stabiliser les moteurs après l’impulsion du « startup power ». Il convient toutefois de ne pas abuser de ce paramètre, qui augmente considérablement la consommation électrique. Il est recommandé de ne pas dépasser 3%, même sur les plus petits drones.
(Exemple : des moteurs 1103 8500KV en 2S peuvent peiner à démarrer avec la valeur par défaut de 0.5%).
– Motor KV : Optimisation du couple à bas régime. Ne pas entrer directement le KV des moteurs : Motor KV = KV réel / (6 / nombre de cellules)
Augmenter ce paramètre accroît l’alimentation à bas régime, améliorant le couple, la réactivité et le propwash. Bien qu’exprimée en « KV », cette valeur dépend de la tension de la batterie. La formule de calcul est :
Motor KV = KV réel / (6 / nombre de cellules)
(Exemple pour des moteurs 8500KV en 2S : 8500 / (6/2) = 2833 KV).
Il est également possible d’entrer une valeur arbitraire : un KV plus faible offre plus de couple mais augmente la consommation. Il est donc pertinent de réduire ce KV si de grandes hélices sont utilisées sur un petit stator (ex: 1404 en 3.5″).
– Motor poles : Le nombre d’aimants sur la cloche du moteur.
Cette valeur est généralement de 12 pour les moteurs 1404 ou plus petits, et de 14 pour les formats supérieurs.
– Beeper volume : À ajuster avec précaution.
Un volume au maximum peut causer un double démarrage des ESC, voire empêcher le démarrage correct. Les moteurs consomment en effet beaucoup d’énergie pour produire un bip puissant, et ce à des fréquences que les régulateurs de tension ont des difficultés à gérer.
– PWM Frequency : 24-48 pour un gros drone, 48-96 pour un modèle plus petit.
Il s’agit de la fréquence de commutation des ESC. Une valeur trop élevée réduira le couple et la vitesse maximale, tout en risquant des désynchronisations. Une valeur trop basse augmentera la consommation et diminuera la précision.
2.2 Les cases à cocher
Les options déconseillées pour un usage sur drone sont indiquées en italique.
- Stuck rotor protection : Si le moteur ne parvient pas à démarrer dans les 3 secondes suivant l’armement, l’ESC abandonne pour se protéger.
- Stall protection : Conçue pour les voitures RC. Si le moteur force, AM32 le pousse davantage pour éviter l’arrêt.
- Use hall sensors : Prévu pour la robotique, nécessite un capteur physique pour déterminer la position du moteur.
- 30ms interval telemetry : Nécessite un fil supplémentaire pour la télémétrie, très rarement utilisé en FPV.
- Complementary PWM : Agit comme un frein moteur en court-circuitant les phases (sans consommer de courant). Indispensable en FPV pour la réactivité de la machine.
- Auto timing advance : AM32 gère automatiquement le timing optimal pour les moteurs, rendant le réglage manuel du slider obsolète.
- PWM Type : En 32 bits, les ESC peuvent faire varier le PWM selon la vitesse du moteur et les capacités des composants. L’option « Variable » est recommandée pour une gestion automatique de ces paramètres.
3. Les autres réglages
Il est conseillé de laisser ces paramètres par défaut. Ils s’appliquent principalement aux autres types de véhicules RC et n’ont pas d’utilité pour le vol en FPV.

4. Exemples de configurations
Le partage de configurations spécifiques (moteurs/ESC atypiques) sur Discord ou par e-mail est encouragé afin d’enrichir ce guide et d’aider la communauté.
4.1 Configuration : 2.5 pouces 2S (Type « Kayoumini »)

Résumé du build : Batterie 2S, moteurs 8500KV, AIO Ysido AM32 20A.
Constat : Avec les paramètres AM32 par défaut, l’armement des moteurs était impossible.